Again, consider the general constrained optimization problem
Goal: design a simple algorithm, based on first-order information to solve (1).
Recall from Chapter 4 that, for unconstrained problems () with differentiable objective, one simple algorithm is gradient descent (GD):
For constrained problems, a natural generalization is projected gradient descent (PGD), which combines GD with (Euclidean) projection onto .
Projection onto a set¶
Comments
computing is itself an optimization problem
returns the closest point(s) (in Euclidean norm) to that belongs to the set
when is closed and convex the projection is unique
if , then
in many important cases, can be computed explicitly. Example
Projected gradient algorithm¶
Typical step-size strategies
fixed-step size for all
backtracking linesearch (determine at each iteration based on sufficient decrease condition)
Example¶
Consider the optimization problem
First, let us plot the objective function and feasible set.
Source
import numpy as np
import matplotlib.pyplot as plt
# Objective function
def f(x, y):
return (x - 2)**2 + (y - 1)**2
# Gradient
def dfdx(x, y):
return np.array([2*(x - 2), 2*(y - 1)])
# Constraint boundaries
def c1(x):
return x**2 # represents x^2 - y < 0
def c2(x):
return 2 - x # represents x + y < 2
# Ranges
xs = np.linspace(-5, 5, 400)
ys = np.linspace(-5, 5, 400)
X, Y = np.meshgrid(xs, ys)
# Prepare figure
plt.figure()
# Forbidden region from constraint 1: y < x^2
plt.fill_between(xs, c1(xs), ys.min(), color="gray", alpha=0.4,
label="Forbidden by constraint 1")
# Forbidden region from constraint 2: y > 2 - x
plt.fill_between(xs, c2(xs), ys.max(), color="gray", alpha=0.4,
label="Forbidden by constraint 2")
# Feasible region: x^2 < y < 2 - x
plt.fill_between(xs, c1(xs), c2(xs), where=c2(xs) > c1(xs),
color="green", alpha=0.2,
label="Feasible region")
# Contour of objective function
Z = f(X, Y)
plt.contour(X, Y, Z, cmap="inferno", levels=20) # thermal-like colormap
# Global minimizer
plt.scatter([1], [1], s=40, label="Global minimizer (1,1)")
# Labels and limits
plt.xlabel("$x_1$")
plt.ylabel("$x_2$")
plt.xlim(-3, 2)
plt.ylim(-1, 5)
plt.legend()
plt.show()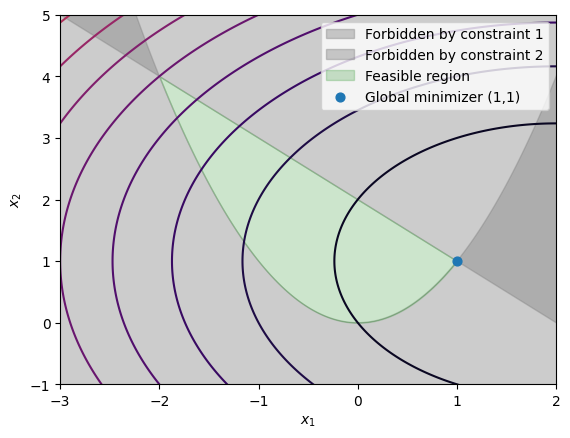
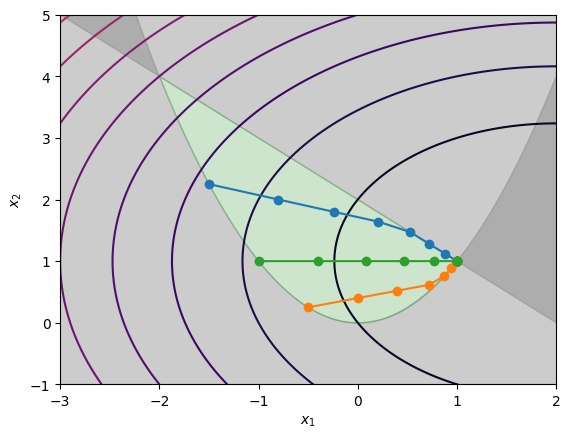
This can now visualize the trajectory of PGD for various starting points. In this example, we cannot compute easily the projection onto , so that we compute it using a numerical solver (CVXPy, see in a few sections). The implementation is very basic, uses fixed step-size, and stops after a finite a number of iterations. Of course, we can do better, but that’s just to demonstrate how PGD forces iterates to be feasible by projecting the usual GD step onto .
Source
import numpy as np
import cvxpy as cp
# Projection onto the constraints
def projConstraints(x):
z = cp.Variable(2)
objective = cp.Minimize(cp.sum_squares(x - z))
constraints = [
z[0]**2 - z[1] <= 0, # z1^2 - z2 <= 0
z[0] + z[1] - 2 <= 0 # z1 + z2 <= 2
]
problem = cp.Problem(objective, constraints)
problem.solve(solver=cp.SCS, verbose=False)
return z.value
# Projected Gradient Method
def ProjectedGradient(xinit, alpha, niter=10):
xn = np.zeros((2, niter + 1))
xn[:, 0] = xinit
for n in range(niter):
grad = dfdx(xn[0, n], xn[1, n]) # gradient at current iterate
x_next = xn[:, n] - alpha * grad
xn[:, n+1] = projConstraints(x_next)
return xn
zn = ProjectedGradient(np.array([-1.5, 1.5**2]), 0.1, niter=10)
zn2 = ProjectedGradient(np.array([-0.5, 0.5**2]), 0.1, niter=10)
zn3 = ProjectedGradient(np.array([-1.0, 1.0]), 0.1, niter=10)
# plotting
xs = np.linspace(-5, 5, 400)
ys = np.linspace(-5, 5, 400)
X, Y = np.meshgrid(xs, ys)
plt.figure()
# Forbidden regions
plt.fill_between(xs, c1(xs), ys.min(), color="gray", alpha=0.4)
plt.fill_between(xs, c2(xs), ys.max(), color="gray", alpha=0.4)
# Feasible region
plt.fill_between(xs, c1(xs), c2(xs), where=c2(xs) > c1(xs),
color="green", alpha=0.2)
# Objective contours
Z = f(X, Y)
plt.contour(X, Y, Z, cmap="inferno", levels=20)
# Trajectories
plt.plot(zn[0], zn[1], marker="o")
plt.plot(zn2[0], zn2[1], marker="o")
plt.plot(zn3[0], zn3[1], marker="o")
plt.xlim(-3, 2)
plt.ylim(-1, 5)
plt.xlabel("$x_1$")
plt.ylabel("$x_2$")