where f0 is a convex function and Ω a convex set (by definition of a convex optimization problem). We also assume that f0 is differentiable (i.e., f0∈C1).
One of the key feature of convex optimization problems is that any local optimum is also a global optimum (see this theorem).
First-order characterization of optimal points for convex problems¶
Proof
⇐ Let x⋆∈Ω such that the condition is satisfied. Then by convexity of f0, one has for y∈Ω, f0(y)≥f0(x⋆)+∇f0(x⋆)⊤(y−x⋆)≥f0(x⋆). Thus x⋆ is optimal.
⇒ Suppose x⋆∈Ω is optimal but the conditions does not hold. There is some y∈Ω for which ∇f0(x⋆)⊤(y−x⋆)<0.
Consider z(t)=ty+(1−t)x⋆ for t∈[0,1]. Since Ω is convex, z(t)∈Ω.
Moreover, observe that f0′(z(t))=∇f0(z(t))⊤(y−x⋆) and thus for t=0 one has f0′(z(t))∣t=0=∇f0(x⋆)⊤(y−x⋆)<0.
For small positive t, we thus have f0(z(t))≤f0(x⋆) which shows that x⋆ is not optimal. Hence we have a contradiction.
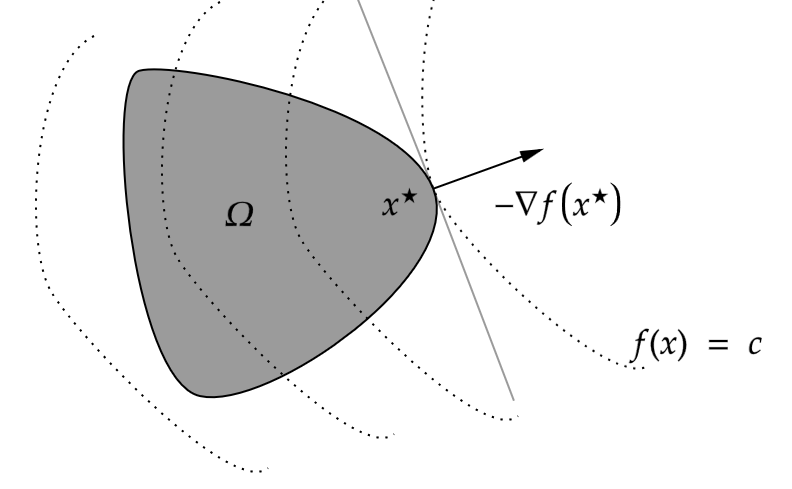
If ∇f0(x⋆)=0, the vector −∇f0(x⋆) defines a supporting hyperplane to Ω at x.
In the context of Theorem 1, letting a=−∇f0(x⋆) the condition (2) rewrites as a⊤y≤a⊤x⋆ for all y∈Ω. Therefore,
{y∣a⊤y=a⊤x⋆} is a supporting hyperplane to Ω at point x⋆.
A geometric illustration of the optimality condition for convex problems.